Patrick Naughton |
|
|
I am a Research Scientist in the robotics team within Vladlen Koltun's research organization at Apple. Before that I was a PhD student in the School of Computer Science at the University of Illinois at Urbana-Champaign. I worked with Professor Kris Hauser in the Intelligent Motion Lab (IML) on open-world teleoperation. Before that, I graduated with a BS in Electrical Engineering and Computer Science from Washington University in St. Louis, where I worked on hardware security with Professor Xuan Zhang. |
Email / CV / GitHub / Google Scholar / LinkedIn |
Publications
|
ResPilot: Teleoperated Finger Gaiting via Gaussian Process Residual LearningPatrick Naughton, Jinda Cui, Karankumar Patel, Soshi Iba CoRL 2024 paper / arxiv / website / |
|
|
Integrating Open-World Shared Control in Immersive AvatarsPatrick Naughton*, James Seungbum Nam*, Andrew Stratton, Kris Hauser ICRA, 2024 paper / arxiv / youtube / |
|
|
Immersive Commodity Telepresence with the AVATRINA Robot AvatarPatrick Naughton*, Joao Marcos Correia Marques*, Jing-Chen Peng*, Yifan Zhu*, James Seungbum Nam, Qianxi Kong, Xuanpu Zhang, Aman Penmetcha, Ruifan Ji, Nairen Fu, Vignesh Ravibaskar, Ryan Yan, Neil Malhotra and Kris Hauser International Journal of Social Robotics, Special Issue on Robot Avatars for Telepresence and Social Interaction, 2024 paper / website / youtube / Related workshop papers:
|

|
Analysis and Perspectives on the ANA Avatar XPRIZE CompetitionKris Hauser, Eleanor ‘Nell’ Watson, Joonbum Bae, Josh Bankston, Sven Behnke, Bill Borgia, Manuel G. Catalano, Stefano Dafarra, Jan B.F. van Erp, Thomas Ferris, Jeremy Fishel, Guy Hoffman, Serena Ivaldi, Fumio Kanehiro, Abderrahmane Kheddar, Ga ̈elle Lannuzel, Jacquelyn Ford Morie, Patrick Naughton, Steve NGuyen, Paul Oh, Taskin Padir, Jim Pippine, Jaeheung Park, Jean Vaz, Daniele Pucci, Peter Whitney, Peggy Wu and David Locke International Journal of Social Robotics, Special Issue on Robot Avatars for Telepresence and Social Interaction, 2024 paper / arxiv / website / youtube / |
|
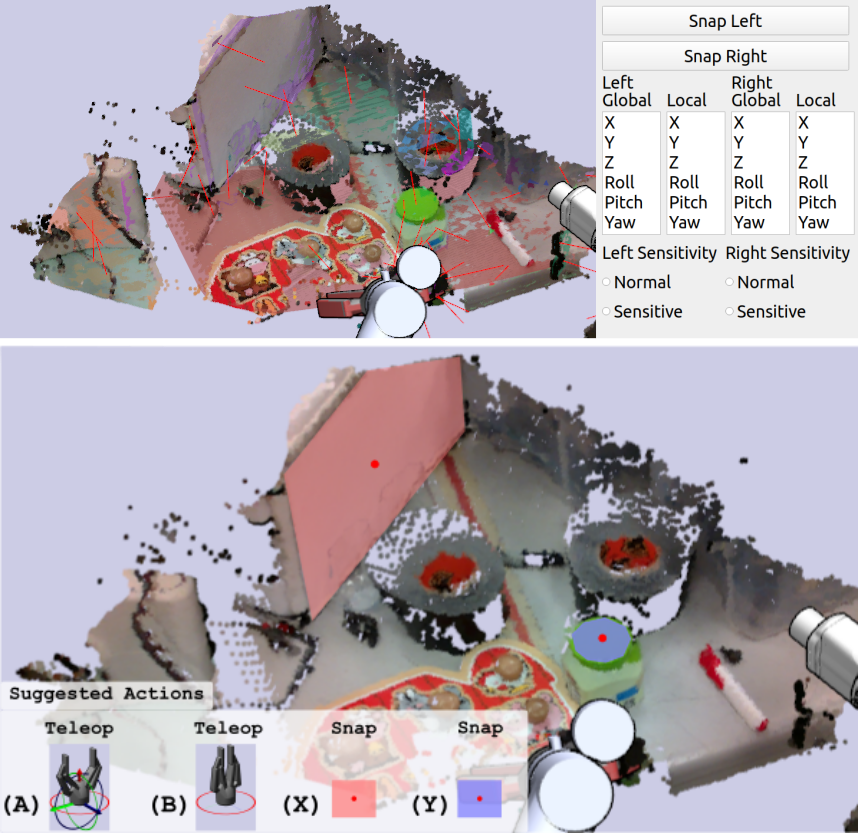
Structured Action Prediction for Teleoperation in Open WorldsPatrick Naughton, Kris Hauser RAL, 2022 paper / youtube / |
|
Design and source code from Jon Barron's website |